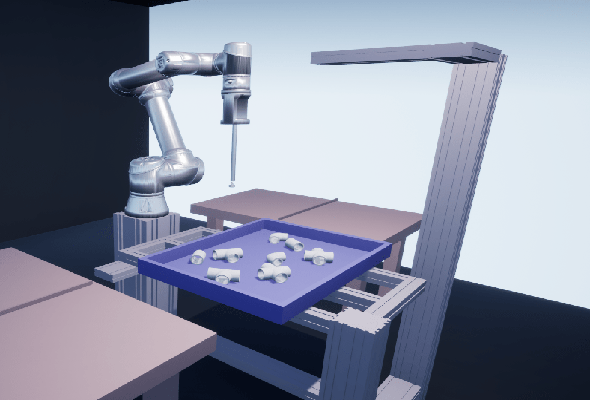
3D Bin Picking
3D Bin Picking은 로봇이 3D 카메라와 인공지능(AI)을 활용하여 무작위로 쌓여 있는 물체를 인식, 선택, 그리고 집어내는 기술을 의미합니다. 이는 물류, 제조, 자동차 산업 등 다양한 산업 분야에서 활용되며, 특히 자동화된 생산 공정에서 중요한 역할을 합니다.
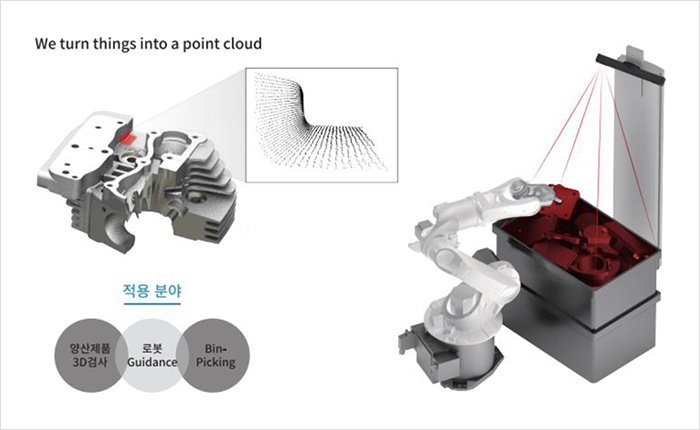
3D 비전 시스템
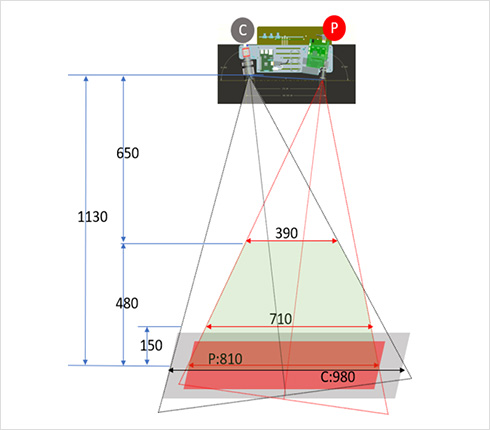
3D 카메라: 물체의 깊이 정보와 3차원 형상을 스캔합니다.
스캔 데이터: 물체의 위치와 자세(Orientation)를 파악하여 작업 가능 여부를 결정합니다.
로봇 팔(Robot Arm)
물체를 잡기 위한 그리퍼(Gripper)와 연동됩니다.
스캔된 3D 데이터를 기반으로 움직여 정확히 물체를 집어냅니다.
소프트웨어 알고리즘
AI 및 딥러닝 기반 물체 인식과 경로 계산(Path Planning)을 수행합니다.
충돌 방지와 작업 최적화를 위해 3D 시뮬레이션을 포함합니다.
그리퍼(Gripper)
물체의 크기와 형태에 따라 적합한 설계가 필요합니다.
진공 흡착형, 기계식 클램프형 등 다양한 타입이 사용됩니다.